
A technique to teach bimanual robots stir-fry cooking
[ad_1]
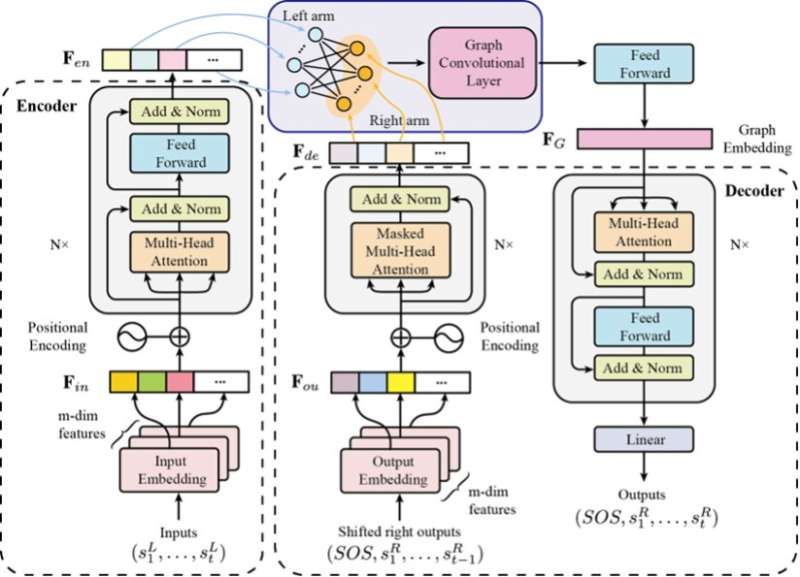
 representation and proposed a spatio-temporal neural network — Structured-Transformer for learning the coordination. In the online process, the left-arm motion is adjusted according to the visual feedback, and the corresponding right-arm motion is generated by the pre-trained Structured-Transformer model based on the left-arm motion. Credit: Liu et al.")
As robots make their way into a wide variety of authentic-world environments, roboticists are seeking to ensure that they can efficiently total a developing quantity of tasks. For robots that are developed to assist individuals in their households, this features home chores, this sort of as cleaning, tidying up and cooking.
Scientists at the Idiap Investigate Institute in Switzerland, the Chinese University of Hong Kong (CUHK) and Wuhan University (WHU) have a short while ago created a machine mastering-based mostly strategy to specially instruct robots to learn stir-fry, the Chinese culinary cooking method. Their strategy, presented in a paper revealed in IEEE Robotics and Automation Letters, combines the use of a transformer-based design and a graph neural network (GNN).
“Our the latest function is the joint effort of three labs: the Robotic Studying & Interaction team led by Dr. Sylvain Calinon at the Idiap Research Institute and the Collaborative and Versatile Robots laboratory led by Prof. Fei Chen Cuhk and the lab led by Prof. Miao Li at WHU,” Junjia Liu, just one of the scientists who carried out the research, advised TechXplore. “Our a few labs have been finding out and doing the job collectively for about ten many years. We have a individual desire in generating intelligent robots that can prepare foodstuff for individuals.”
Dr. Calinon, Prof. Chen and Prof. Miao have been striving to increase the cooking techniques of robots for a number of decades now. In their the latest analyze, they determined to emphasis on the Chinese culinary arts, precisely stir-fry, a cooking technique that entails frying substances above high heat while stirring them, normally using a Wok pan.
“Though domestic support robots have been produced considerably in latest several years, generating a robotic chef in the semi-structured kitchen setting remains a grand problem,” Liu stated.
“Food preparing and cooking are two essential things to do in the domestic, and a robotic chef that can stick to arbitrary recipes and cook dinner instantly would be sensible and deliver a new interactive leisure working experience.”
Stir-fry, the cooking type that the crew targeted on in their current paper, involves elaborate bimanual competencies that are hard to educate to robots. To properly do this, Liu and his colleagues 1st experimented with to prepare a bimanual coordination product recognized as a “structured-transformer” working with human demonstrations.
“This system regards coordination as a sequence transduction difficulty between the movements of the two arms and adopts a blended product of transformer and GNN to realize this,” Liu explained. “As a result, in the online procedure, the left-arm movement is adjusted in accordance to the visual feedback, and the corresponding correct-arm motion is produced by the pre-trained structured-transformer product centered on the remaining-arm movement.”
The researchers assessed their model’s performance both equally in simulations and on a actual physical two-handed robotic platform, identified as the Panda robotic. In these exams, their product allowed the robot to effectively and realistically reproduce the motions concerned in stir-fry.
“The major contribution of this paper is to think about the coordination mechanism of bimanual robots explicitly in the sort of sequence transduction,” Liu stated. “In comparison with classical studying from demonstration solutions and deep studying/reinforcement learning centered techniques, our decoupled framework skillfully combines both these tactics. In truth, it can have both of those the generalization of the previous and the expressivity of the latter.”
In the long run, the product introduced by this workforce of researchers could allow the progress of robots that can cook dinner foods both of those in house environments and at community venues. In addition, the identical solution could be made use of to train robots on other tasks that entail the use of two arms and hands. In the meantime, Liu and his colleagues program to proceed doing work on their model, to improve its efficiency and generalizability.
“We will now introduce increased dimensional information to learn additional humanoid movement in kitchen expertise, this sort of as visual and electromyography alerts,” Liu additional. “The estimation of semi-fluid contents in this do the job was simplified as two-dimensional picture segmentation, and we only employed the relative displacement as the sought after concentrate on. Thus, we also prepare to suggest a additional comprehensive framework that is composed of each the actions of bimanual manipulators and the state modify of the item.”
A beaver-inspired technique to guidebook the movements of a 1-legged swimming robotic
Junjia Liu et al, Robotic Cooking With Stir-Fry: Bimanual Non-Prehensile Manipulation of Semi-Fluid Objects, IEEE Robotics and Automation Letters (2022). DOI: 10.1109/LRA.2022.3153728
© 2022 Science X Network
Citation:
A approach to instruct bimanual robots stir-fry cooking (2022, June 17)
retrieved 20 June 2022
from https://techxplore.com/information/2022-06-procedure-bimanual-robots-stir-fry-cooking.html
This document is topic to copyright. Apart from any fair working for the function of private analyze or research, no
component may be reproduced with no the penned permission. The content material is offered for information and facts applications only.
[ad_2]
Resource connection




